Contect
-
Постов
128 -
Зарегистрирован
-
Посещение
-
Победитель дней
13
Тип контента
Профили
Форумы
Галерея
Загрузки
Блоги
Видео
Весь контент Contect
-
Хорошо Вчера вечером поездил на ней с роботами в музее интересной науке Роботы пока меня обогнать не могут)) Давал порулить разработчикам роботов и понравилась фраза одного из них: "Программисты ездят хуже чем их программы")
-
Обычно на куяльник ездим по субботам
-
Перед сегодняшними заездами сделал полное то своей мелкой багги. Полностью разобрал, поменял\почистил\смазал подшипники, поменял шестерни, перелил масла в дифференциалах\амортизаторах, помыл и собрал. Характеристики багги: Двигатель бесколлекторный 5200kv 18a 2-3s Li-po Регулятор оборотов 35а Полный привод 2 дифференциала Пиньон 14т Аккумулятор 2200MAh 2s 7,4v Максимальная скорость: 2s 69Км\Ч, 3s 78Км\Ч










-
Элевоны придется настраивать под мультивий Вес не позволяет пропы будут расходником Сегодня нацепил элевоны и нагрузил крыло весом 13 грамм Планирует хорошо, надеюсь уложусь электроникой в этот вес Сервы планирую ставить Spektrum A2010 весом 2 грамма планирую еще их облегчать
-
С пульта В стабилизаторе полета будет встроенный приемник на 2,4 Ггц рулевые поверхности еще не нацепил на крыло
-
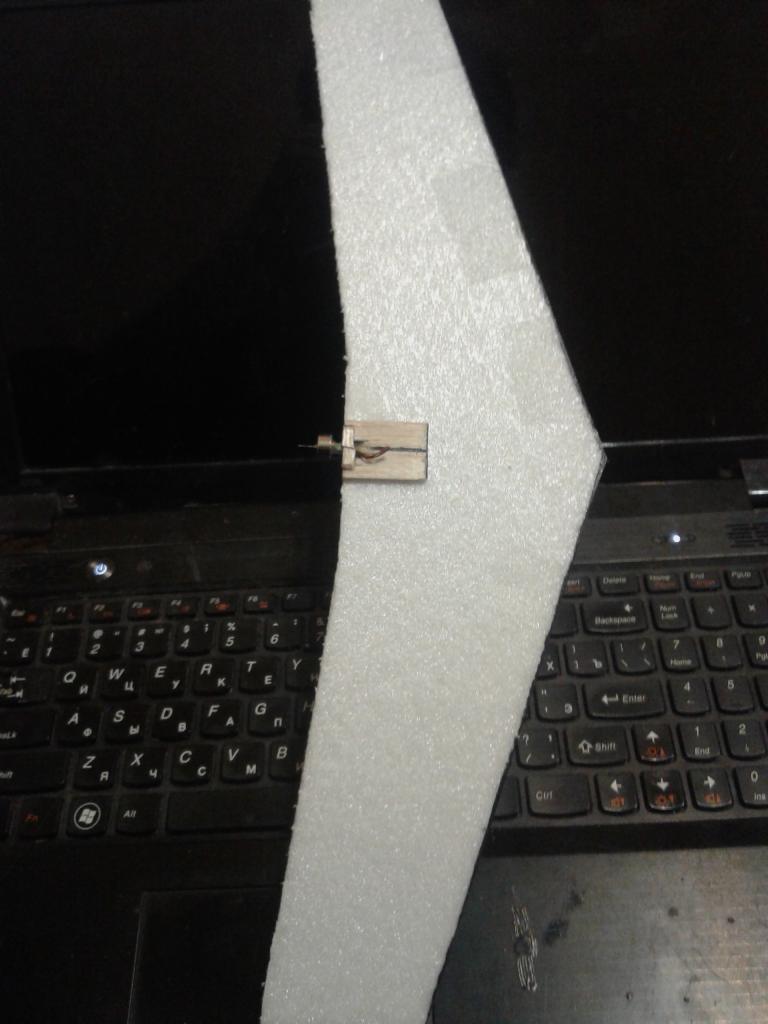
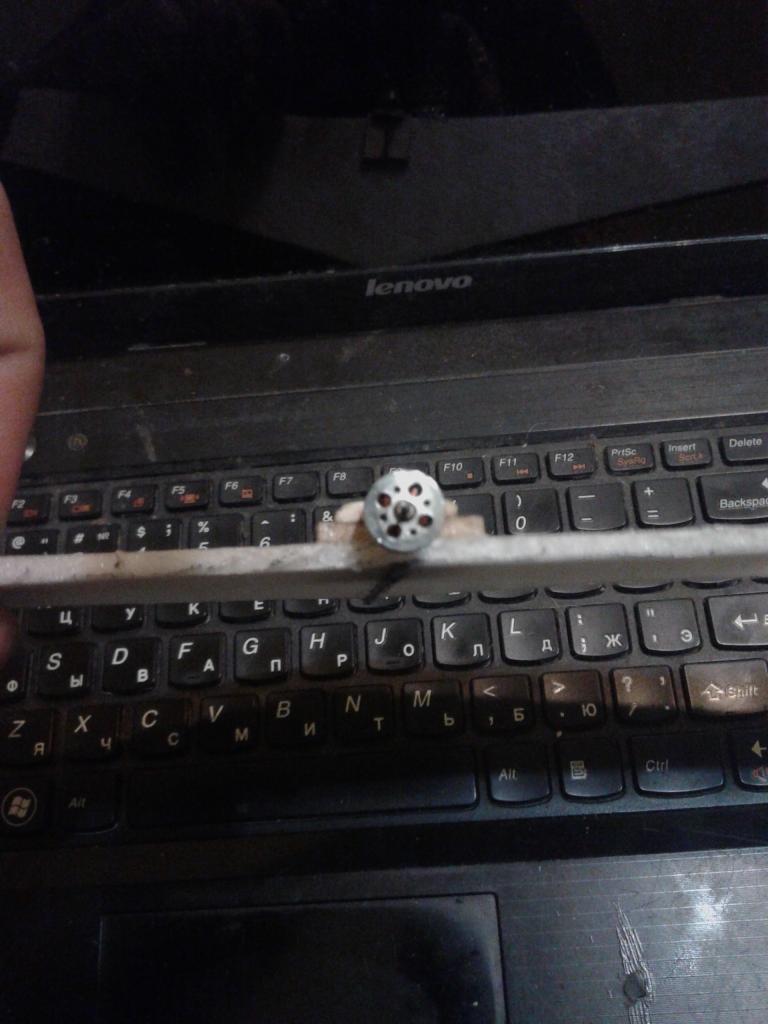
Давно хотел микро самолетик. И решил собрать микро летающее крыло. Делаю из потолочной плитки по вечерам Характеристики: Размах 380мм Полетный вес максимум 20-25 грамм Двигатель бесколлекторный 12000 об\в, 1,8 грамм Регулятор оборотов 6 ампер Планируется стабилизатор полета на atmega 328 и mpu6050 Крыло по передним кромкам и от носика до двигателя усилено карбоном



-
Сейчас из-за травмы временно не могу летать, мало работаю и постоянно лежу дома. В голове появляется очень много интересных идей Одна из: квадрокоптер для автоматической съемки (скорее фото чем видео) человека либо объекта. (сэлфи-коптер ) Для экспериментов нужен любой ардрон, в любом (или почти любом) состоянии Желательно недорого или даром. Помню что кто то с этого форума мне говорил о ненужном ардроне.
-
Скорее всего готовое установить будет сложнее чем переделать это Как винты крепятся к валу?
-
моторы нужно подбирать по размеру должны подойти моторы 370го класса в комплекте должны быть руль направления и площадка под сервопривод если площадки нет можно выпилить из дерева и вклеить на циакрине привод переделывать наверное не нужно только дейвуды маслом забить да и моторы я бы эти попробовал все таки этот катер не должен сильно быстро плавать насчет аккума ошибся сюда надо 2s 2200- 2700
-
Сервопривод - любой стандартного размера Регулятор хода - любой коллекторный 10-20А (можно собрать самому) Аппу на 27Mhz могу дать Аккум 3s 2200MАh Моторы пока попробовать родные
-
Можно поставить, но не нужно Мощнее двигатель ставят на монстров такого же масштаба
-
А что там сейчас стоит? Собрать стоит)
-
Уже немного покатался максимальная скорость на только обкатанном движке и не настроенном карбюраторе была 75 км\ч
-
Он идет в бак В этих машинах нет насоса для топлива поэтому топливо качается в двигатель выхлопными газами
-
Купил себе подарок на др Protech YADA st Багги масштаба 1\8 Характеристики* 3 мм алюминиевое шасси* Все приводные детали из стали* 4x4 привод * 3 дифференциала* Двигатель SX-21 (3,5 см3)* Регулируемая подвеска* Алюминиевые масляные амортизаторы* Композитные плечи* Тюнингованный алюминиевый глушитель* Чрезвычайно низкий центр тяжести* Очень легкие дифференциалы* Металлические редукторы сервоприводовВес: 3400 гМашина пока проходит обкатку


-
Внимательно проверь пайку и просмотри всю плату возможно где то оловом капнул Какой флюз использовался при пайке?
-
@UR5FSV, Режим RTH полезен, но у фантомов бывают с ним приколы. FOLLOW ME нормально не реализован нигде. У dji бывают пролеты мимо точки, а у ardupilot он почти постоянно "в разработке" Только у 3DR есть наработки на проце Intel edison с использованием камеры. По Dji заметил что чем новее аппарат тем больше с ним проблем: Фантом 1 летал хорошо и проблем с ним не было, фантом 2 стал падать и улетать, у vision+ появились проблемы с подвесом, а недавно я пытался прошить inspire 1 и это вообще ужас.
-
Dji всем хорош кроме техподдержки и выпуском сырых прошивок. Но есть одна проблема с которой люди сталкиваются чаще всего "flyaway" Неуправляемый улет в китай в непонятном направлении. Причин такого "улета" несколько: 1. Ошибки компаса (он там 3-х осевой). 2. Влет до инициализации полетного контроллера. 3. Ошибки полетного контроллера. Методы борьбы: 1. Перед полетами ОБЯЗАТЕЛЬНО калибруем компас (на месте взлета,подальше от больших трансформаторов и других вещей которые могут влиять на компас) 2. После включения дожидаемся быстрого промаргивания зеленым. 3. Дожидаемся пока аппарат найдет минимум 7 спутников и начнет мигать одиночным зеленым (необходимо для запоминания точки взлета) 4. Режимом RTH (возврат домой) пользуемся только в экстренных случаях, если потеряли в воздухе аппарат есть режим home lock. 5. Перед взлетом, а еще лучше дома проверяем заряд батарей пульта, телевизора, ground station и всего что есть. Если есть ground station делаем следующее: 1. В программе PC Ground Station нажимаем Home point (станет активной кнопка set home point) 2. Там же нажимаем set home point. 3. В появившемся окне видим координаты и нажимаем set home point. В случае flyaway: Если нет ground station: 1. Отключаем если включен Course\Home lock, включаем режим Gps если стоял Atti. 2. Переключателем полетных режимов (Gps, Atti) быстро переключаем в режим Atti и снова в Gps. 3. Надеемся что управление нам вернулось. 4. Если управление вернулось летим домой не включая в режим Course\Home lock, если аппарат управляется неадекватно включаем режим Atti. Если есть Ground Station: 1. Нажимаем Go Home (рядом с set home point) 2. Надеемся что прилетит. Научно исследовательская работа проведена с другом Стасом на его аппарате Проверялось на: dji f550, naza v2, 2.4 ghz datalink (ground station), Rc switch для отключения питания аппарата на случай потери контроля и катушка намотанная на компас для получения "flyaway". Описанные выше способы не дадут 100% гарантии что аппарат не улетит, но с ними шанс его спасти немного больше.
-
Всех с праздником!
-
Поставил нормальные мозги и полноценно облетал аппарат время полета 6-10 минут мозги apm 2.5 + minimosd+ power module летает хорошо но задумываюсь о покупке naza v2
-
Облетал 250ку, убил комплект пропеллеров время полета 8-10 минут, курсовая камера sony effio-v рекомендую подумать в сторону dji f550 с naza v2 она надежнее фантомов и летает лучше
-
Почему улетел? У нас в магазине есть 3-5 пультов от улетевших фантомов)
-
Все таки начал собирать Racer 250 планирую на днях облетать без фпв, если не сильно буду занят на работе пока думаю над камерой и телеметрией
-
http://www.radiomuseum.org/tubes/tube_6v4.html вроде кенотрон ez81 куплена куплю 12ax7
-
Куплю кенотрон ez80, ez81 или 6V4 или любой импортный аналог Добавлю нужны еще 12ax7